battlebot
1-3 lb Personal Battlebot for IEEE@UH Robotics
Overview
This repository contains the design files, documentation, and development history of my personal combat robot projects. Future updates will include more detailed schematics, wiring diagrams, and comprehensive build documentation.
Robot Designs
| Robot | Season | Components List | Status |
|---|---|---|---|
| Shell Spinner | 2024-2025 | 📋 Components | Complete |
| Kraken Hammer | 2026 | TBD | In Development |
Project Timeline
2024-2025: Shell Spinner
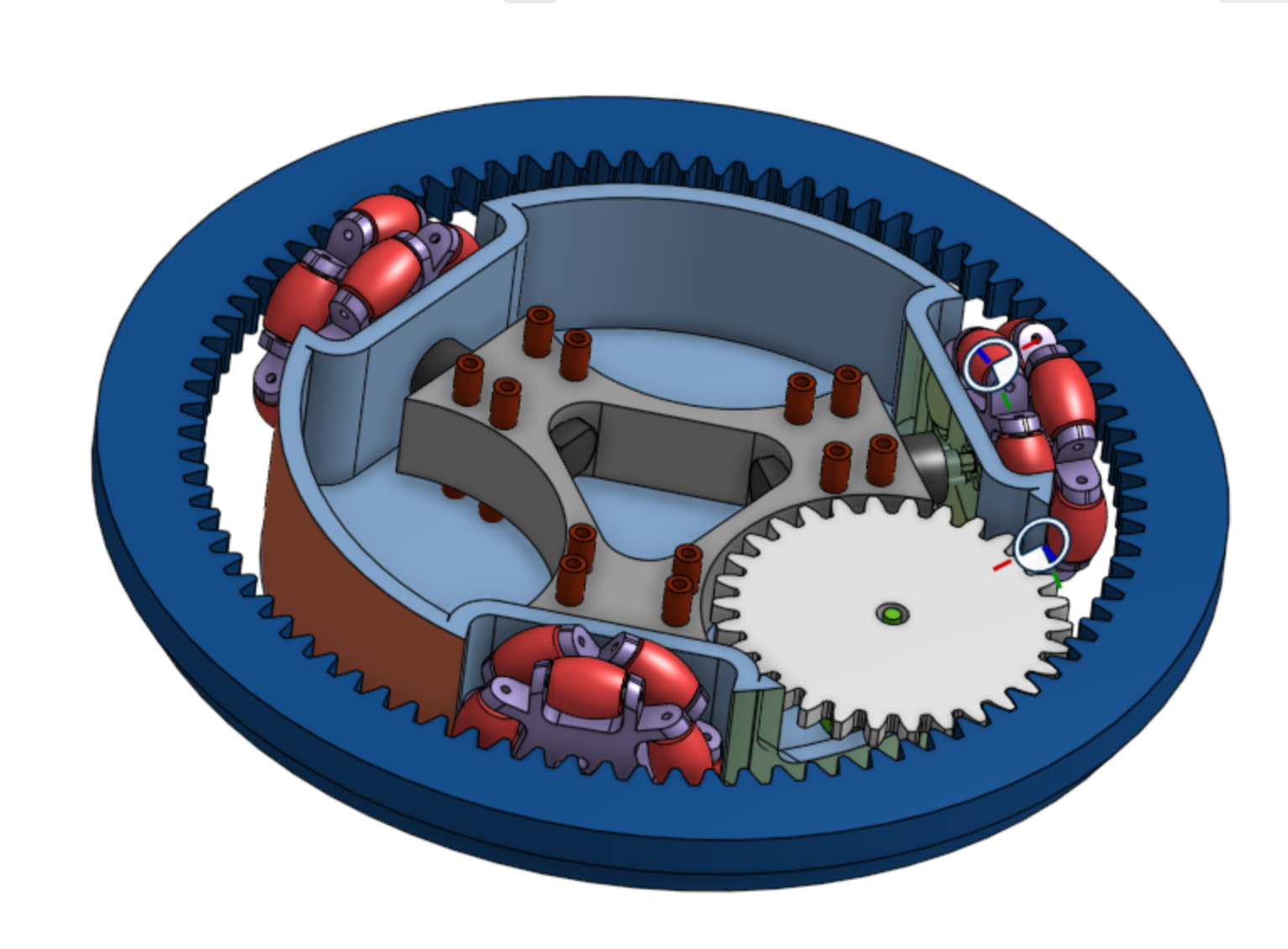
The first iteration of this project was a shell spinner design, developed throughout the 2024-2025 season. Features a brushless motor-driven spinning shell with simplified planetary gear system (single planet and ring gear). See shellspinner/ for CAD files and detailed design.
2026: New Design
Starting in 2026, this project is evolving with a completely new robot design to explore different combat strategies and mechanisms. Check out Design Decisions
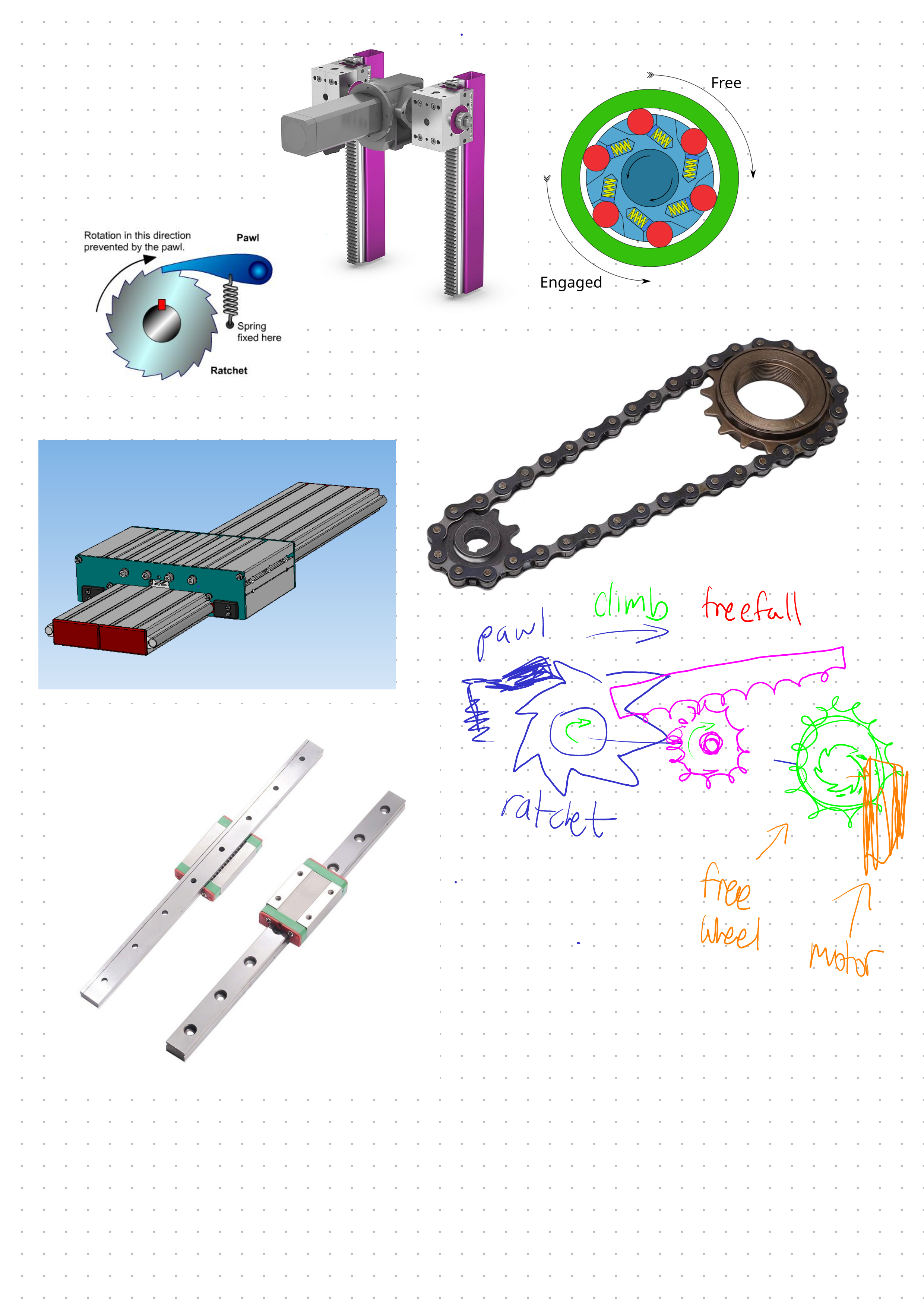 Initial brainstorming for the 2026 robot design
Initial brainstorming for the 2026 robot design